-

Machin Otomatik aksesib pou chèz woulant
Segondè presizyon lazè mezire aparèy yo itilize nan chèz woulant otomatik ka ede li nan plizyè fason.1.Segondè presizyon lazè mezi ka itilize pou ede chèz woulant yo wè obstak ki antoure ak anviwònman, tankou moun, mi yo, mèb, pòt, elatriye.Li piplis -
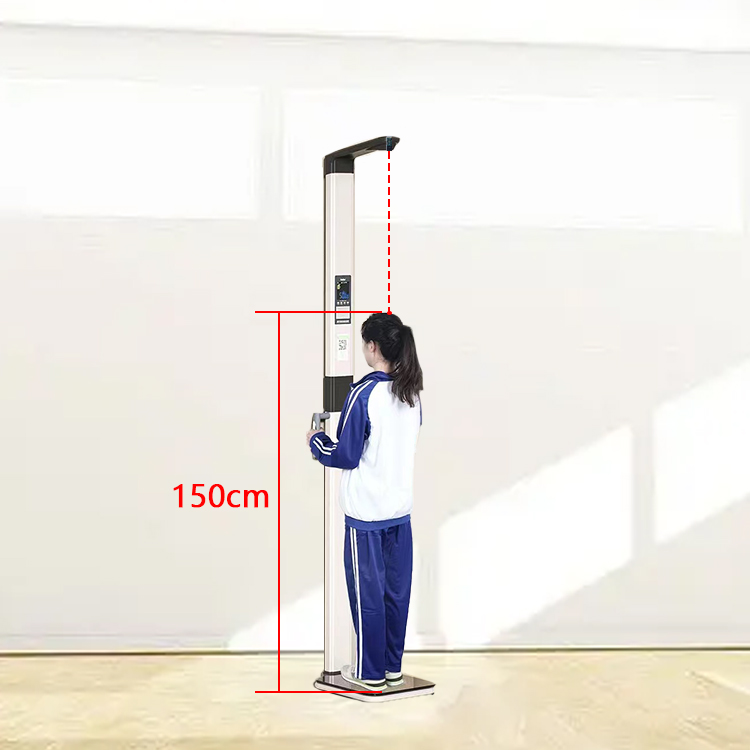
Sistèm deteksyon wotè kò imen an
Detèktè distans lazè ka lajman itilize nan sistèm deteksyon wotè kò moun.Sèvi ak Capteur distans egzat la, wotè kò imen an ka byen mezire an tan reyèl.Nan sistèm deteksyon wotè kò imen an, Capteur lazè distans la ka mete ...Li piplis -

Capteur lazè pou robo
Avèk amelyorasyon kalite lavi moun yo, robo bale yo te antre nan plizyè milye kay epi yo vin tounen yon bon èd pou lavi tout moun.Capteur ranje lazè a entegre nan robo baleye a, sa ki ka fè robo baleye a evite obstak epi vire ...Li piplis -

Sistèm Mezi Espò
Nan konpetisyon espò ak tès, tankou so long ak voye piki, mezi distans souvan gen gwo erè akòz faktè imen.Pou jwenn rezilta egzat mezi pèfòmans espò, yon sistèm mezi espò ki baze sou yon Capteur lazè ...Li piplis -

Pozisyon sib robo
Kòm jaden an nan robotik ap kontinye evolye, li vin de pli zan pli enpòtan pou jwenn fason pou amelyore presizyon ak presizyon nan sistèm robotik.Youn nan fason yo reyalize sa a se lè w itilize yon Capteur distans lazè pou pwezante sib robo.Premyèman, yon Capteur distans lazè ofri san parèy ...Li piplis -

Siveyans abèy
Seakeda a ba-pouvwa, segondè-frekans, ak ti-gwosè detèktè lazè yo lajman ki itilize nan dron.Lè w pote seakeda lazè rada ranje nan diferan pozisyon, abèy la ka ede li reyalize fonksyon tankou detèminasyon wotè ak aterisaj asistans.Lidar a distans ki long distans la ...Li piplis -

Robo pou evite obstak
Nan pwosesis la nan travay oswa deplase, robo a ap kontinye rankontre divès obstak, tankou mi fiks, pyeton toudenkou entrigan, ak lòt aparèy mobil.Si li pa ka jije epi reponn a tan, yon kolizyon pral rive.lakòz pèt.Capteur lazè Seakeda a pèmèt r...Li piplis
















